Sensory Rehabilitation Training Module for Neural Recovery | McGill Shared Reality Lab
Overview
This project focused on developing a haptic wearable device for sensory rehabilitation in patients with neural damage. The system leverages tactile co-activation, a neuroscience-backed technique shown to promote brain plasticity through passive, persistent stimulation, with the goal of restoring sensory perception and sensorimotor function in the hand.
The work was conducted as a research project at the Shared Reality Lab at McGill University, in collaboration with advisors in haptics and physiotherapy.
Motivation & Background
Traditional sensory rehabilitation for hand and upper-extremity nerve injuries relies on manual tools such as monofilaments, which deliver limited and discrete force levels and require constant clinician involvement. This is cumbersome for delivering specific rehabilitation protocols (eg. 1 tap per second for 5 minutes).
Research in neuroscience shows that passive, repetitive tactile stimulation can induce cortical reorganization through co-activation, improving sensory discrimination and aiding recovery after neural injury. Despite promising clinical evidence, tactile co-activation is not widely integrated into rehabilitation tools.
This project explored how a force-controllable haptic wearable could support both rehabilitation therapy and research into brain–behavior relationships.
Design Requirements
Key design requirements were derived from both clinical practice and neuroscience literature:
- Acute tactile stimulation with precisely controllable force and frequency
- Stable, repeatable output suitable for long-duration stimulation
- Ergonomic support for the hand without introducing confounding sensory input
- Compatibility with automated training protocols and experimental studies
Hardware & Platform Design
We developed a wearable haptic platform centered on a custom electromagnetic actuator, adapted from prior research in tactile communication.

Core features included:
- Programmable force output using PWM-based control
- Modular actuator tip designs to explore different stimulation profiles
- Mechanical housings designed in SolidWorks and fabricated through rapid prototyping
- Breadboard-based electronics for rapid iteration and validation
Multiple design iterations were produced to refine ergonomics, actuator placement, and force transmission to the fingertip.

Validation & Characterization
System performance was evaluated through benchtop testing:
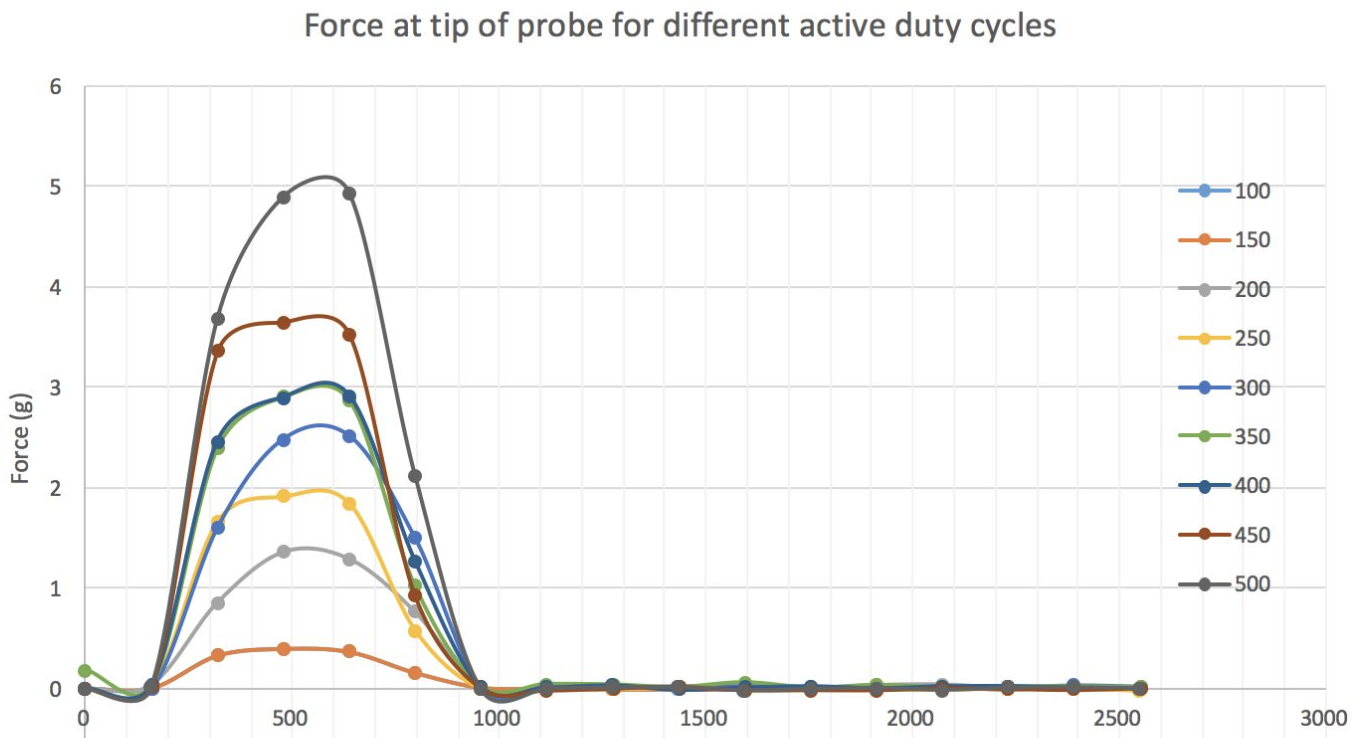
- Force output was measured across different PWM duty cycles
- Temporal force profiles were characterized to ensure repeatability
- Results confirmed stable, controllable force delivery suitable for tactile co-activation protocols
These measurements validated the system’s suitability as a research platform for studying sensory plasticity.
Applications & Future Directions
The device was designed as both:
- A rehabilitation tool to support sensory re-education after neural injury
- A research platform for investigating how tactile co-activation influences perception and learning
Planned future work included:
- Integration of programmable signal generation for structured training protocols
- Refinement of actuator tip designs
- Clinical collaboration with hospitals to evaluate therapeutic effectiveness in patient populations
My Role
- Translated neuroscience and clinical requirements into hardware design constraints
- Designed and iterated on actuator housings and mechanical interfaces
- Implemented force control and characterization experiments
- Co-authored the project poster and presentation materials