Avionics Systems | McGill Rocket Team
My time with the McGill Rocket Team (MRT) from 2017-2021 was definitely the highlight of my undergrad years, combining engineering, teamwork, and a shared passion for rocketry.
As part of the Avionics subteam, I contributed to designing flight electronics responsible for critical functions such as data acquisition, power distribution, ejection, and real-time telemetry for ground control and recovery.
2017–2018 Design Cycle
As a first-year member of the team, I focused on building a strong foundation in embedded systems, circuit design, and avionics testing, while supporting ongoing development and flight preparation efforts.
My contributions during this cycle included:
- Assisting with system tests of flight electronics
- Supporting with integration and validation
- Developing skills in schematic design, microcontroller programming, and hardware debugging through hands-on involvement with the avionics stack
This design cycle culminated in MRT’s victory at the Spaceport America Cup 2018, which reinforced my interest in avionics and motivated my continued involvement with the team.


2018–2019 Design Cycle
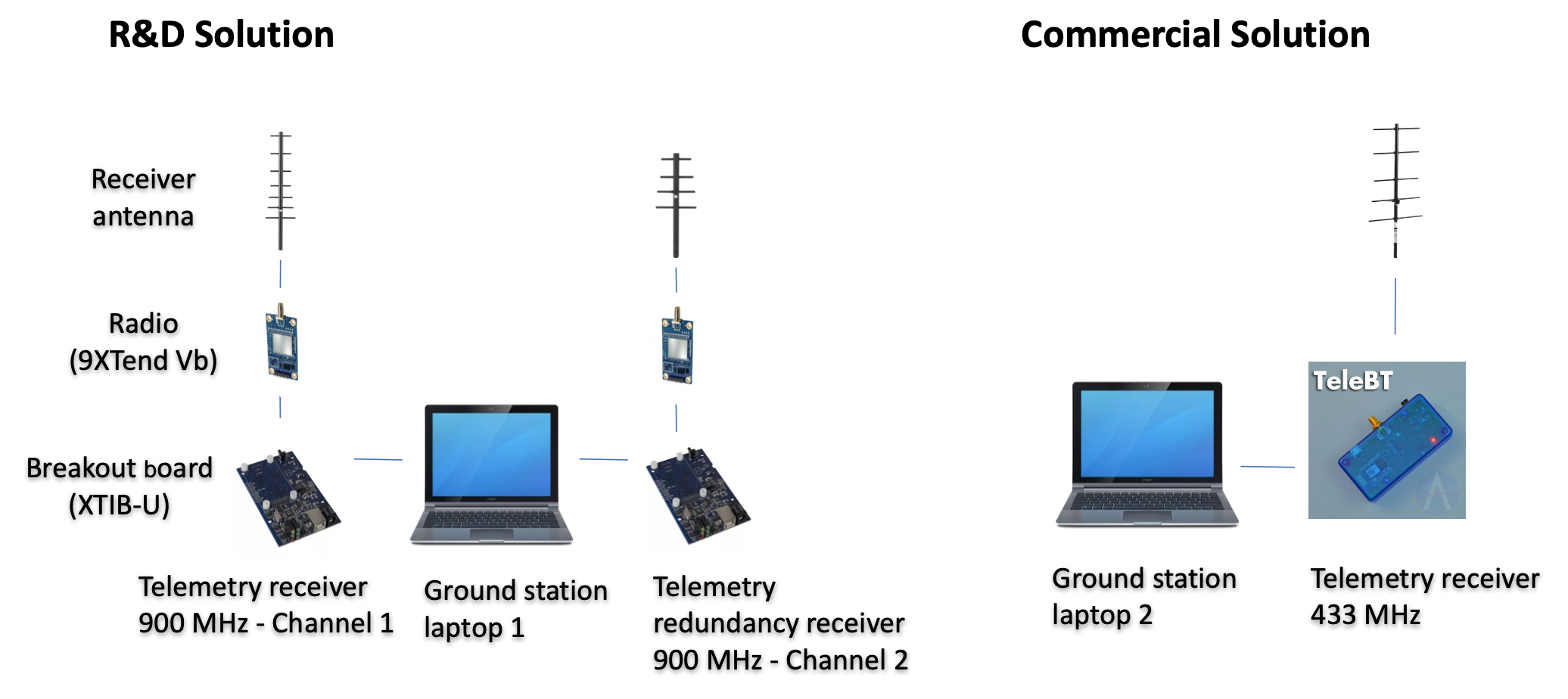
Following MRT’s overall win the previous year, the avionics subteam decided to move away from predominantly commercial off-the-shelf (COTS) solutions and transition toward a student-researched and designed (SRAD) avionics system. The goal was to improve system integration, telemetry reliability, and recovery performance for a 30,000-ft flight.
System Goals
Our avionics design was driven by two primary requirements, as specified by the competition guidelines:
- Continuous telemetry throughout a ~6.25-minute flight to a 30,000-ft apogee, with a recovery range of up to 15 km
- Reliable and precise ejection timing for drogue and main parachutes
To meet these goals, the avionics system was decomposed into the following subsystems:
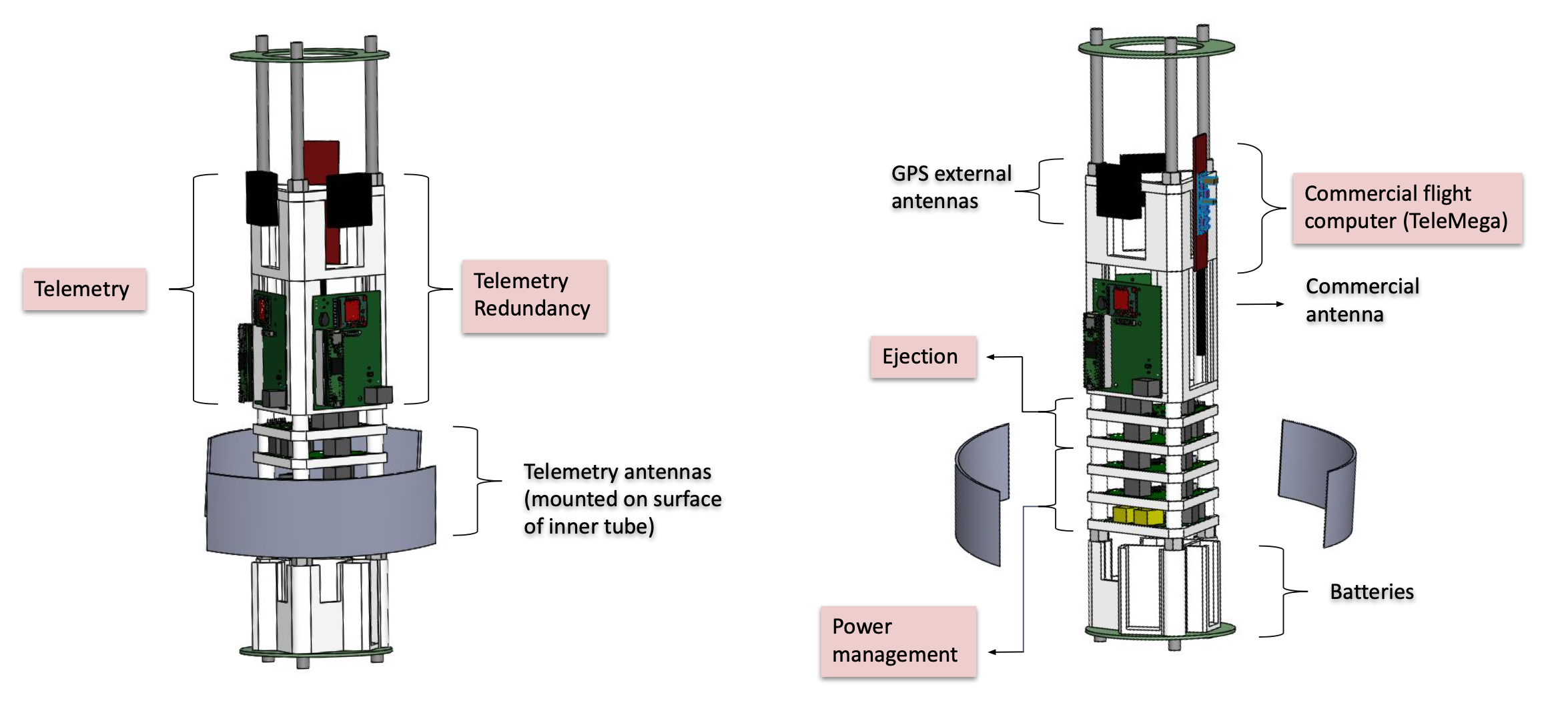
- RF radios and antennas
- Telemetry
- Ejection
- Commercial backup solutions
- Power management and arming mechanism
- Ground station
- Video recorder
My Contributions
I was responsible for the end-to-end design, implementation, and testing of several core avionics subsystems, including circuitry, firmware, PCB layout, and mechanical integration.
Telemetry System
- Designed a Teensy 3.6–based telemetry board integrating a 9-DOF IMU, BME280 pressure sensor, and GPS module
- Implemented packetized data transmission using the XTend vB RF module
- Developed firmware for real-time sensor acquisition and telemetry downlink
Ejection System
- Designed an ATmega328-based ejection controller triggered by the current altitude of the rocket derived from pressure data
- Implemented logic for drogue deployment at apogee and main parachute deployment near landing
- Integrated continuity checks, relay control, and safety features
Video Recorder
- Designed a Raspberry Pi Zero–based video recording system to capture in-flight footage from launch to landing
- Integrated onboard sensors and synchronized recording with flight events
Across all systems, I designed custom PCBs using Altium Designer, developed firmware in C/C++, and collaborated on mechanical housing and integration within the avionics bay.
RF Testing & Validation
To ensure reliable telemetry performance, I participated in extensive RF testing, including:
- Anechoic chamber testing to characterize antenna transmission patterns
- Urban and long-range transmission tests around the city to evaluate signal integrity and link margin
- Validation of telemetry reception at expected flight distances
These tests informed antenna placement, shielding decisions, and transmission power tradeoffs.

Competition
At the end of the design cycle, I traveled with the team to New Mexico to compete in the Spaceport America Cup. Seeing the avionics system operate during launch and recovery was a rewarding culmination of a year-long, system-level engineering effort.


2019–2020 Design Cycle
The 2019–2020 design cycle focused on improving system reliability, testing rigor, and architectural scalability, following communication and integration challenges observed in the previous competition. This year also marked the beginning of a longer-term transition toward a fully custom, STM32-based flight computer.
Due to the COVID-19 pandemic, in-flight testing and competition launches were canceled. As a result, the team placed heavy emphasis on design reviews and documentation.
System-Level Focus
Building on the previous avionics stack, the team prioritized:
- Increased redundancy, including a secondary avionics bay in the nosecone
- Improved space efficiency and power consumption
- More maintainable mechanical integration of avionics boards
- Substantial expansion and standardization of component- and integration-level testing
The avionics bay structure was redesigned to replace silicone-mounted boards with standoff-based assemblies, improving serviceability, manufacturability, and reducing overall bay length.
My Contributions
My work during this cycle spanned R&D, system improvements, and team enablement:
-
Flight Computer R&D
- Led research into transitioning from Arduino/Teensy-based systems to custom STM32-based embedded platforms
- Evaluated STM32 development tools, peripheral drivers, and embedded workflows
- Recreated core telemetry and ejection functionality on STM32 development boards as a foundation for future SRAD designs
-
Subsystem Improvements
- Continued development of Telemetry, Power Management, and Video Recorder systems
- Improved space efficiency by replacing commercial sensor modules with surface-mount components integrated directly into PCBs
- Contributed to design decisions around redundancy, power budgeting, and system layout
-
Testing & Validation
- Helped formalize testing processes across avionics subsystems
- Conducted component-level testing to verify design requirements
- Participated in long-range outdoor telemetry tests (10–15 km) to simulate recovery conditions
- Supported early integration testing to identify interference between radios and neighboring subsystems
-
Team Enablement
- Organized and taught a mechatronics and programming onboarding tutorial series for new members
- Developed internal documentation and training materials to lower the barrier to entry for avionics projects
Outcome
Although flight testing was not possible, this design cycle established a robust technical and organizational foundation. The testing infrastructure, STM32 R&D work, and architectural decisions directly enabled the development of a fully integrated, custom flight computer in the following year.

2020–2021 Design Cycle
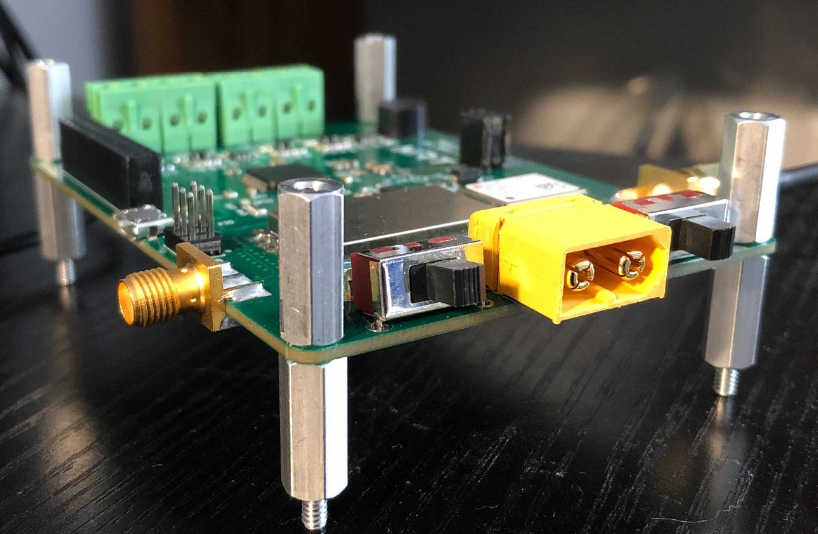
During the 2020–2021 design cycle, I served as the Avionics Subteam Lead and led the development of a fully integrated, single-board Flight Computer. The goal was to consolidate previously separate avionics subsystems into a compact, power-efficient, and robust SRAD solution capable of handling all flight-critical functions.
This project represented a major architectural shift for MRT’s avionics system and built directly on the STM32 research and testing groundwork laid in the previous year.
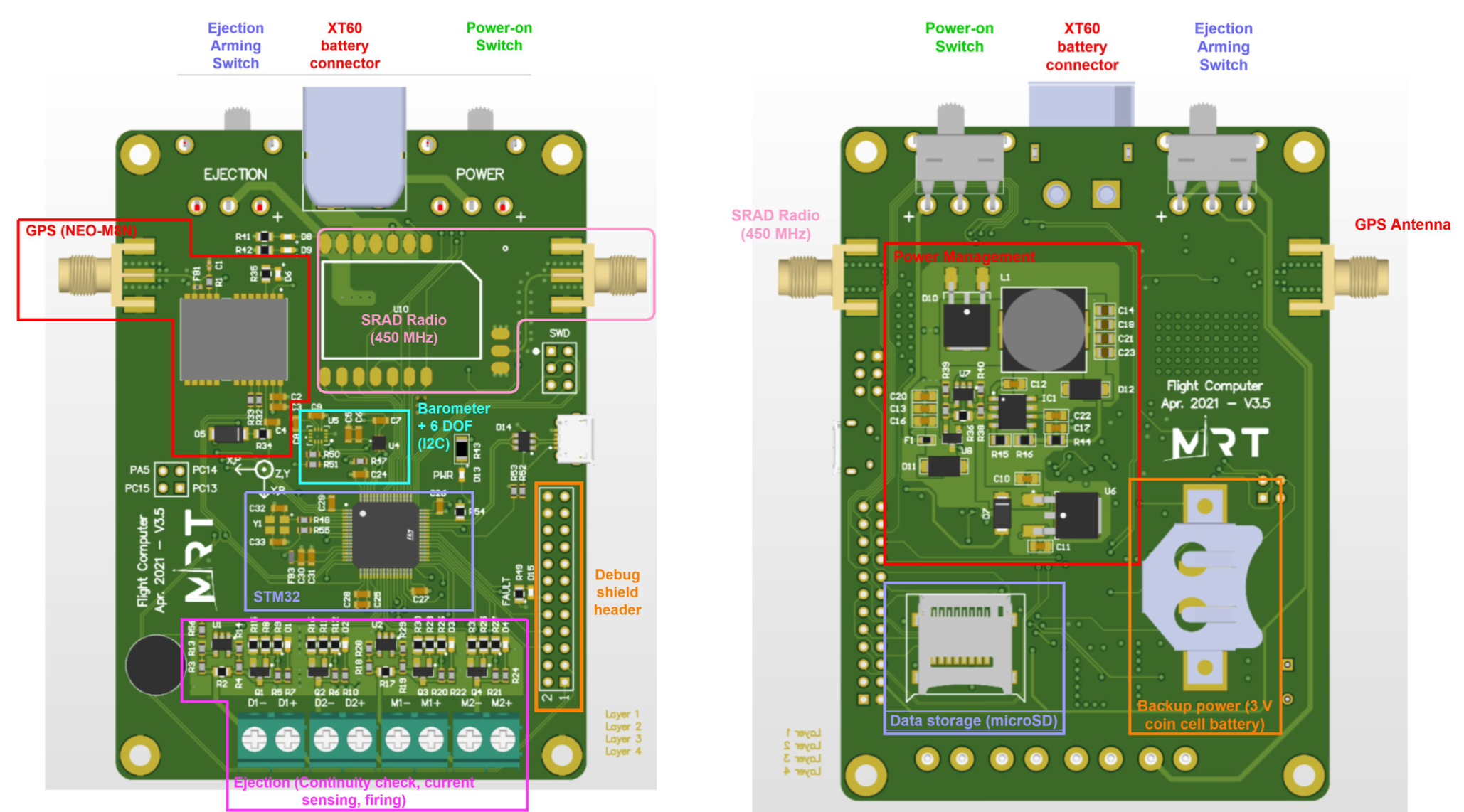
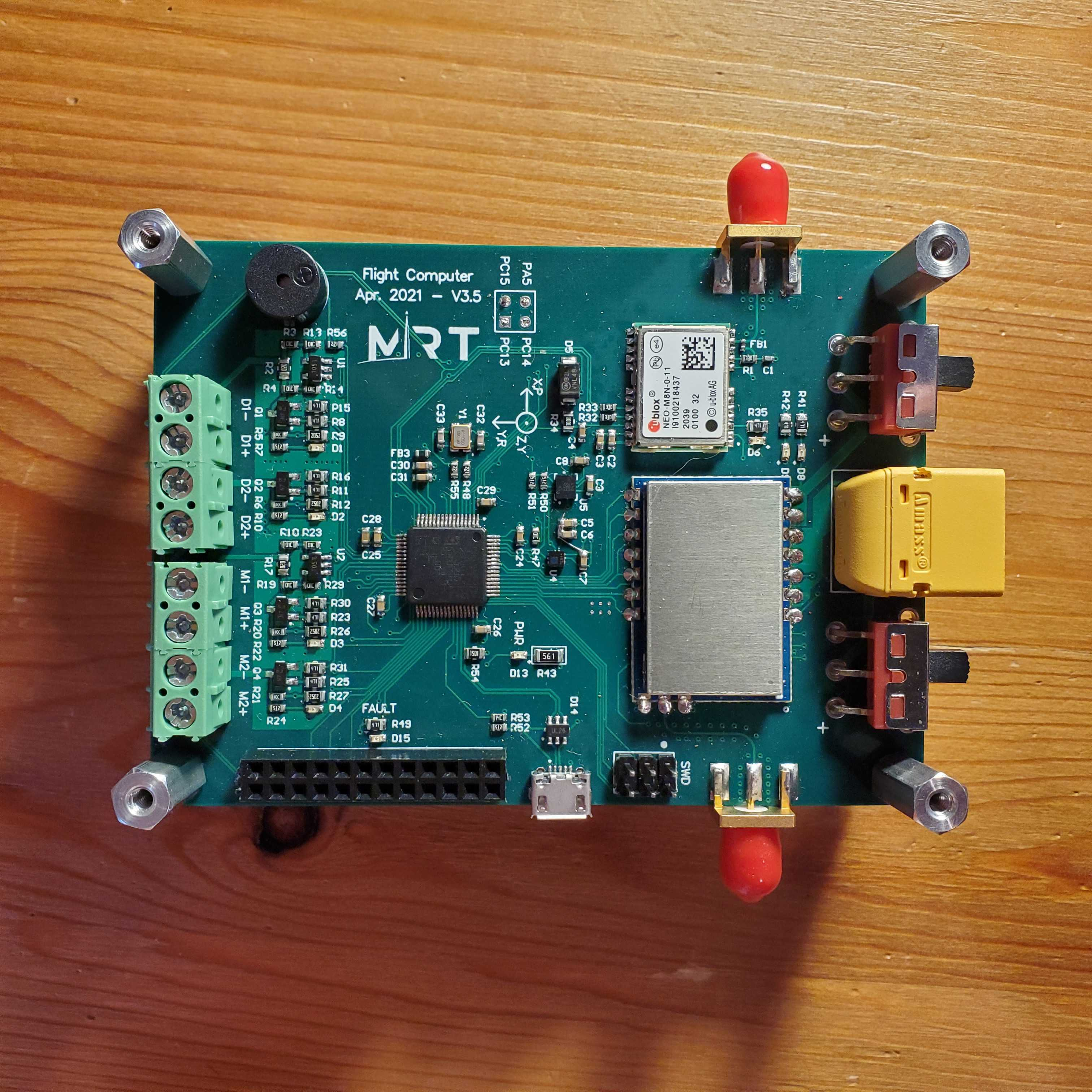
System Overview
The Flight Computer combined the following functionalities onto a single PCB:
- Telemetry and radio communication
- Ejection control and safety logic
- Power management and regulation
- Sensor data acquisition and logging
The system was designed around an STM32F303RE microcontroller, selected for its peripheral support, real-time performance, and scalability across STM32 families.
My Contributions
Embedded Software
- Designed and implemented custom STM32 drivers for all onboard peripherals, including sensors, GPS, real-time clock, radios, and SD card logging
- Developed the Flight Computer’s core control logic, including telemetry scheduling, data logging, and ejection sequencing
- Implemented an interrupt-driven architecture to manage time-critical tasks under flight conditions
Hardware & PCB Design
- Designed multiple hardware revisions of the Flight Computer using Altium Designer
- Implemented a fully solid-state ejection circuit with continuity checks and current sensing
- Created sensor breakout boards to support staged integration and debugging
System Testing & Validation
- Conducted unit, functional, and integration testing, including pressure chamber ejection tests and telemetry range testing
- Validated system behavior using simulated and historical flight data
- Iterated designs across three major hardware revisions based on testing feedback
Leadership & Team Management
- Led the avionics subteam through design reviews, integration planning, and testing milestones
- Mentored new members and authored internal documentation to support long-term maintainability
- Coordinated cross-subteam communication to ensure avionics compatibility with aerostructures, recovery and propulsion systems
Podium Presentation at Spaceport America Cup
In addition to the flight effort, I was responsible for our team’s podium presentation at the Spaceport America Cup to highlight the Flight Computer as a standalone technical engineering project. This presentation was selected as an extra technical showcase representing the team, separate from standard competition deliverables. The presentation slides are shown below:
Outcome
The Flight Computer was accepted for flight for the 2021 Spaceport America Cup. The project demonstrated the feasibility of a fully custom, integrated avionics platform and established a scalable foundation for future MRT rockets.
The complete Flight Computer project is available on GitHub.